




10km Drohnenvideosender fir HDMI Kamera an Telemetrie
● Spezial Algorithmus erméiglecht 12 km mat besserer 1080P Bildqualitéit
● Verbënnt sech iwwer HDMI mat Smart Monitore fir Live-Video-Iwwerwaachung
● Kuerz Verzögerung vun Enn bis Enn 15ms-30ms
● Ënnerstëtzt net lizenzéiert Frequenzbänner vun 2,3 GHz, 2,4 GHz an 2,5 GHz
● HD-Video- an Telemetrie-Empfänger
● Ënnerstëtzt Pixhawk2/cube/V2.4.8/4 an Apm 2.8
● Ënnerstëtzungssoftware op der Äerd: Missiounsplaner a QGround
● Drohnenkommunikatioun + Videoveraarbechtung & Analysen
● Integréiert bidirektional Datenverbindung fir autonom UAVen an Drohnen
● Ethernet-Interface ënnerstëtzt TCPIP/UDP

● CNC-Technologie Duebel-Aluminiumlegierungsgehäuse mat gudder Schlagfestigkeit a Wärmeabsorptioun
● Aarbechtstemperatur: -40℃—+85℃
● Gesamtdimensiounen: 72 × 47 x 19 mm
● Gewiicht: 93g
Kodéiert orthogonal Frequenzdivisiounsmultiplexing (COFDM)
Effektiv eliminéiert Multipath-Interferenzen, léist d'Effizienzproblem a verbessert d'Zouverlässegkeet vun der Iwwerdroung.
End-to-End Niddreg Latenz
● Latenz vun Sender op Empfang manner wéi 33ms.
● CABAC Entropie-Kodéierung an héich Kompressiounsquote fir eng héich Videoqualitéit bei niddreger Bitrate ze garantéieren
● All Frame ass an der selwechter Gréisst kodéiert fir sécherzestellen, datt keng zousätzlech Latenz am drahtlose Kanal duerch e groussen I-Frame verursaacht gëtt.
● Ultraschnell Dekodéierung fir de Motor unzeweisen.
Kommunikatioun op laang Distanz
Fortgeschratt Modulatioun, FEC-Algorithmus, héich performant PA an en ultra-sensiblen Empfänger-RF-Modul fir eng stabil a laang Reechwäit drahtlos Verbindung tëscht der Loftunitéit an der Buedemkontrollstatioun ze garantéieren.
-40℃~+85℃ Aarbechtstemperatur
All Chips an elektronesch Komponenten sinn speziell entwéckelt fir eng industriell Qualitéit ze garantéieren, déi -40℃~85℃ toleréiert.

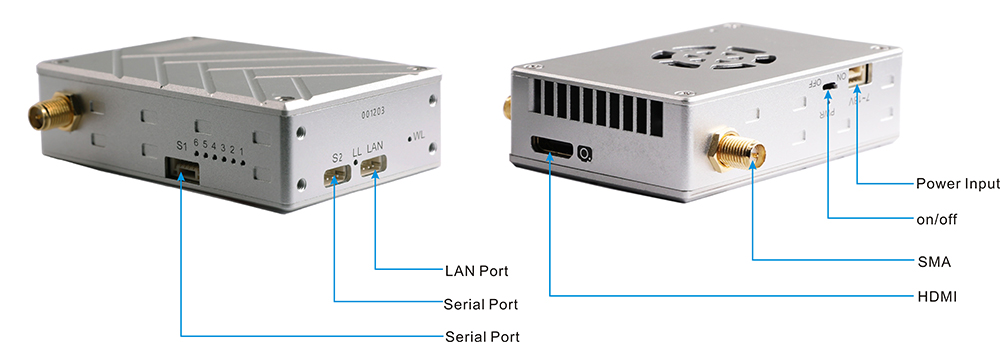
Den FIM-2410 UAV Videosender bitt verschidde Ports wéi HDMI, LAN an zwee bidirektional Seriellports. Dës Ports erméiglechen d'Iwwerdroe vun HD-Video- an Telemetriedaten bis zu 10 km tëscht der Buedemstatioun an der Loftunitéit. De Seriellport ass fir de Cube Autopilot, Pixhawk 2/V2.4.8/4, Apm 2.8 geduecht.
Dronen mat Echtzäit-drahtlose Videostreaming-Verbindung hunn eng Villfalt vun Uwendungen an der Fotografie, Iwwerwaachung, Landwirtschaft, Katastrophenrettung a Liewensmëtteltransport a wäiten oder schwieregen Gebidder vu Stied.

| Frequenz | 2,3 GHz/2,4 GHz (2,402-2,478 GHz)/2,5 GHz fir Är Optioun |
| Feelerdetektioun | LDPC FEC/Video H.264/265 Superfehlerkorrektur |
| HF-Iwwerdroungsleistung | 1 Watt (Loft-Buedem-Reechwäit 10-16 km) |
| Stroumverbrauch | TX: 10 Watt |
| RX: 6 Watt | |
| Frequenzbandbreet | 4/8MHz |
| Latenz | ≤15-25ms |
| Iwwerdroungsquote | 3-5 Mbit/s |
| Empfangsempfindlechkeet | -100dbm@4Mhz, -95dbm@8Mhz |
| Videofaarfraum | Standard 4:2:0 |
| Antenn | 1T1R |
| Video-Input/Output-Interface | HDMI mini TX/RX, oder FFC an HDMI-A RX/TX ëmwandelen |
| Kompriméiert Videoformat | H.264+H.265 |
| Bitrate | Bis zu 115200 bps (Software-Upassung) |
| Verschlësselung | AES 128 |
| Transmissiounsdistanz | Loft-Buedem Distanz 10-12 km |
| Startzäit | < 30s |
| Zwee-Weeër-Funktioun | Ënnerstëtzung vu Video- an Duplexdaten gläichzäiteg |
| Donnéeën | TTL Ënnerstëtzung |
| Stroumversuergung | Gläichstroum 7-18V |
| Interface | 1080P/60 HDMI Mini-RX |
| 100Mbps Ethernet op USB / RJ45 op Windows × 1 | |
| S1 TTL bidirektional Seriellport x1 | |
| Stroumzugang x1 | |
| Indikatorluucht | HDMI-Input/Output Status |
| Senden an Empfang | |
| Status vum Video Board | |
| Kraaft | |
| HDMI | HDMI mini/flexibelt flaacht Kabel (FFC) |
| Temperaturberäich | Betribstemperatur: -40°C ~+ 85°C |
| Lagertemperatur: -55°C ~+ 100°C | |
| Ausgesinn Design | CNC-Technologie/duebel Aluminiumlegierungsschuel mat waasserdichtem Design |
| Dimensioun | 72×47×19mm |
| Gewiicht | Transaktioun: 93g / Rezept: 93g |
Verwandte Produkter
-

1,4 GHz an 800 MHz 16 km TCPIP an UDP Laangstrecken HD Video Iwwerdroungssystem fir IP Kamera
-

12 km TCPIP/UDP COFDM UAV Video an Daten Downlink
-

150km laang Reechwäit Drone Videosender fir HD Video an Full Duplex Daten
-

16 km laangstrecken SDI HDMI Full HD digital Bildtransmissiounssystem mat Mavlink Telemetrie
-

30km Dron Groussreechwäit TCPIP/UDP 30Mbps Sender 2Watt 2*2 MIMO IP MESH Link





Verwandte Fall
-

MESH Kabellos Videoiwwerdroung iwwer laang Distanzen ...
-

2Watt Kabellos IP MESH Link Test fir déi längst Reechwäit...
-

5 Virdeeler vun der COFDM-Technologie am drahtlose Video...
-

Wéi ee mat senge Mataarbechter an engem Rem zesummeschafft...
-

Wéi kann d'Kommunikatioun tëscht groussen Trans...
-
IWAVE IP MESH Radio fir UAV an onbemannt Buedem...





