Düşündiriş
Simsiz wideo geçirişiniň hakyky ulanylyşynda köp müşderi päsgelçilikler we görünmeýän şertlerde ýapyk ýerlerde ulanýarlar.Şol sebäpden, tehniki toparymyz simsizligimizi subut etmek üçin şäher ýerasty awtoulag duralgalarynda daşky gurşaw simulýasiýa synaglaryny geçirdi Geçiriş moduly, görünmeýän gurşawda zerur aralygy gazanmak üçin estafeta köp hoply transmissiýany ulanyp biler.
Çyzykly simsiz wideo geçirişiniň dürli ssenariýalary
1 、 Robotlaryň amaly ssenarileri
Robot tehnologiýasynyň ösmegi we kämillik derejesi bilen onuň ulanylyş meýdanlary we gerimi barha giňelýär.Elektrik stansiýalary, podstansiýalar, nebiti gaýtadan işleýän zawodlar, himiýa zawodlary, ýangyn heläkçiligi bolan ýerler, kesel ýokanç ýerleri, mikroblar üçin howply ýerler we ş.m. ýaly el bilen barlamagy we gözegçiligi talap edýän köp howply gurşaw.
2. UGV amaly ssenarileri
Pilotsyz ýerüsti ulaglar, adatça dürli iş we kyn şertlerde we aşa sowukda we yssyda işleýärler.Oba ýerlerinde, fermalarda, tokaýlarda, ýabany ýerlerde we hatda gämi gurşawynda ölçegleri, gözegçilikleri we gözegçiligi amala aşyrýar.Hatda käbir söweş meýdançalarynda howply zatlary gözlemek, ýykmak we partlatmak hem geçirilýär.

Robotlar we pilotsyz ýerüsti ulaglar howply, gyssagly, kyn we gaýtalanýan işleri ýerine ýetirmek üçin adaty işçi güýjüni çalyşdy.Işgärleriň saglygyny we howpsuzlygyny üpjün etmek bilen bir hatarda, umumy çykdajylary azaldýarlar we işleýiş we tehniki hyzmatyň netijeliligini ýokarlandyrýarlar.
Kynçylyk
Çyzykly simsiz wideo geçirişiniň kynçylyklary we kynçylyklary
Operatorlar hakyky ýagdaýa öz wagtynda we düşnükli düşünip biler ýaly, uzak aralykda simsiz simsiz kabul ediş nokadyna robotlar / awtonom ulaglar tarapyndan düşürilen wideolary, şekilleri we beýleki maglumatlary geçirmek gaty möhümdir.
Hakyky gözleg gurşawynyň çylşyrymlylygy sebäpli köp sanly bina, metal we beýleki päsgelçilikler, dürli elektromagnit päsgelçilikler bar, şeýle hem simsiz wideonyň durnuklylygyna we durnuklylygyna täsir edýän ýagyş we gar ýaly amatsyz howa faktorlary bar. robotlaryň / pilotsyz ulaglaryň geçiriş ulgamy.Ygtybarlylyk we päsgelçiliklere garşy ukyplylyk üçin berk talaplar öňe sürülýär.
Simsiz wideo geçiriş ulgamynda uzak möhletli gözleglere we ösüş toplamalaryna esaslanýar,simsiz wideo geçiriş modulyIWAVE tarapyndan işe girizilen dürli çylşyrymly şertlerde robot programmalarynyň isleglerini kanagatlandyryp biler.Aşakdaky simulirlenen ssenariýalaryň synag netijelerine serediň.
Çözgüt
Awtoulag duralgasynyň sahnasy bilen tanyşlyk
Awtoulag duralgasynyň aýratynlyklary:
l A / B / C / D / E / F / T we ş.m. bölünen 5000-den gowrak awtoulag duralgasy bolan uly meýdany öz içine alýar.
l Ortada köp sütün we gaty berk bölekler bar.
l fireangyn gapylaryndan başga, aragatnaşyga aralaşmak we hakyky programmalarda has çylşyrymly ssenariýalary simulasiýa etmek mümkin däl.
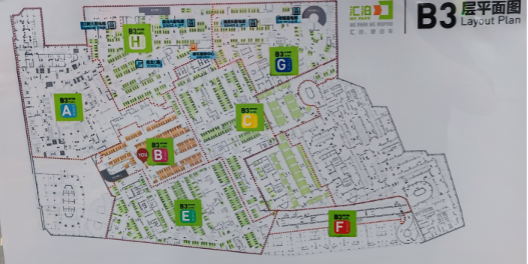
Simulýasiýa ssenariý tertibi we çözgütleri
Meýilnamadaky geçiriji modullar awtoulag duralgasynyň dürli ýerlerine ýerleşdirildi we simulýasiýa geçiriji robotda wideo, datçik maglumatlary we robot dolandyryşy üçin signal signalyny bermek üçin robotda.Kabul ediş nokady dolandyryş otagynda bolup, ýokaryk ýerleşdirilip, konsola birikdirilip bilner.Arasynda jemi 3 modul bar, olar aralygy uzaltmak we aýlaw geçirişini ýerine ýetirmek üçin röle düwünleri bolup hyzmat edýär.Jemi 5 modul ulanylýar.


Awtoulag duralgasynyň ýerleşiş diagrammasy / Robot gözleg ýolunyň diagrammasy

Peýdalary
IWAVE simsiz geçiriş modulynyň artykmaçlyklary
1. Tor ulgamyny we ýyldyz ulgamyny goldaň
IWAVE simsiz geçiriş FDM-66XX modulyseriýaly önümler Multipoint torlaryna ulalýan nokady goldaýar.Bir baş düwün 32 gul düwünini goldaýar.
IWAVE simsiz geçiriş FD-61XX modul seriýaly önümler MESH-iň özbaşdak guralan ulgamyny goldaýar.Haýsydyr bir daşaýjynyň esasy stansiýasyna bil baglamaýar we 32 düwün haltasyny goldaýar.
2. Ajaýyp çyzykly däl geçiriş ukyby, ýokary zolakly geçiriş tizligi 1080P wideo geçirişini goldaýar
OFDM we anti-multipath tehnologiýasyna esaslanyp, IWAVE simsiz geçiriş moduly, çylşyrymly, wizual däl şertlerde wideo geçirişiniň durnuklylygyny üpjün edip, ajaýyp çyzykly geçiriş mümkinçiliklerine eýedir.Transferiň geçiriş aralygy 500-1500 metre ýetip biler we 1080p wideo geçirişini goldaýar.we dürli gözegçilik signallarynyň iberilmegi.
3. Ajaýyp päsgelçilik ukyby
OFDM we MIMO tehnologiýalary, elektrik stansiýalary ýaly çylşyrymly elektromagnit şertlerde durnukly işlemegi üpjün edip, önümleriň bu tapgyryna ajaýyp päsgelçiliklere garşy mümkinçilikleri getirýär.
4. Goldawmaglumatlary aç-açan geçirmek
IWAVE simsiz geçiriş modulygoldaýarTTL, RS422 / RS232 protokollary we 100 Mbit / s Ethernet porty we seriýa porty bilen enjamlaşdyrylandyr.Dürli hünärli robotlaryň amaly zerurlyklaryny kanagatlandyrmak üçin şol bir wagtyň özünde ýokary kesgitli wideo we gözegçilik maglumatlary geçirip biler.
5.Senagatda öňdebaryjy wideo geçirişiň gijikdirilmegi, 20m-den pes
Laboratoriýa synaglary wideo geçirişiň gijä galýandygyny görkezýärIWAVE simsiz geçiriş modulyseriýasy bary-ýogy 20ms, bu häzirki bazardaky wideo geçiriş gijikdirmelerinden has pes we has gowy.Örän pes gijikdirme, yzky buýruk merkezine wagtynda gözegçilik etmäge, robot hereketlerine gözegçilik etmäge we çylşyrymly şertlerde işleri takyk ýerine ýetirmäge kömek eder.
6. Maglumat howpsuzlygyny üpjün etmek üçin hususy protokollaryň iki taraplaýyn kodlanan iberilmegini goldaýar
Robot barlaglary häzirki wagtda partlaýjy zyňmakda, ýangyn söndürmekde, serhet goragynda we beýleki ssenariýalarda ulanylýar we maglumatlaryň howpsuzlygy üçin ýokary talaplar bar.IWAVE simsiz geçiriş modulyseriýaly önümler, maglumatlaryň howpsuzlygyny we gizlinligini netijeli üpjün edip, hususy protokollara esaslanýan şifrlenen geçirişi goldaýar.
Iş wagty: 15-2023-nji dekabry