การแนะนำ
ในเดือนธันวาคม 2564ไอเวฟอนุญาตให้บริษัท Guangdong Communication ทำการทดสอบประสิทธิภาพของเอฟดีเอ็ม-6680-การทดสอบประกอบด้วยประสิทธิภาพ Rf และการส่งผ่าน อัตราข้อมูลและเวลาแฝง ระยะการสื่อสาร ความสามารถในการป้องกันการรบกวน ความสามารถด้านเครือข่ายโดยมีรายงานพร้อมรายละเอียดดังนี้
1. การทดสอบประสิทธิภาพ Rf และการส่งผ่าน
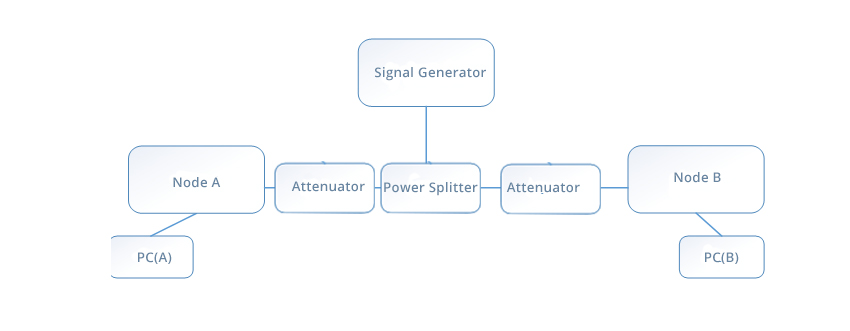
สร้างสภาพแวดล้อมการทดสอบตามรูปที่ถูกต้องเครื่องทดสอบคือ Agilent E4408Bโหนด A และโหนด B เป็นอุปกรณ์ที่อยู่ระหว่างการทดสอบอินเทอร์เฟซ RF เชื่อมต่อผ่านตัวลดทอนสัญญาณและเชื่อมต่อกับเครื่องทดสอบผ่านตัวแยกกำลังเพื่ออ่านข้อมูลในหมู่พวกเขาโหนด A คือโมดูลการสื่อสารของหุ่นยนต์และโหนด B คือโมดูลการสื่อสารเกตเวย์

ทดสอบแผนภาพการเชื่อมต่อสภาพแวดล้อม
| ผลการทดสอบ | |||
| Nuเบอร์ | รายการการตรวจจับ | กระบวนการตรวจจับ | ผลการตรวจจับ |
| 1 | บ่งชี้พลังงาน | ไฟแสดงสถานะจะเปิดขึ้นหลังจากเปิดเครื่อง | ปกติ ☑Unปกติ□ |
| 2 | วงปฏิบัติการ | เข้าสู่ระบบโหนด A และ B ผ่าน WebUi เข้าสู่อินเทอร์เฟซการกำหนดค่า ตั้งค่าย่านความถี่การทำงานเป็น 1.4GHz (1415-1540MHz) จากนั้นใช้เครื่องวิเคราะห์สเปกตรัมเพื่อตรวจจับจุดความถี่หลักและความถี่ที่ถูกครอบครองเพื่อยืนยันว่าอุปกรณ์รองรับ 1.4GHz. | ปกติ ☑Unปกติ□ |
| 3 | ปรับแบนด์วิธได้ | เข้าสู่ระบบโหนด A และ B ผ่าน WebUI เข้าสู่อินเทอร์เฟซการกำหนดค่า ตั้งค่า 5MHz, 10MHz และ 20MHz ตามลำดับ (โหนด A และโหนด B รักษาการตั้งค่าให้สอดคล้องกัน) และสังเกตว่าแบนด์วิดท์การส่งข้อมูลสอดคล้องกับการกำหนดค่าผ่านเครื่องวิเคราะห์สเปกตรัมหรือไม่ . | ปกติ ☑Unปกติ□ |
| 4 | ปรับกำลังได้ | เข้าสู่ระบบโหนด A และ B ผ่าน WebUI เข้าสู่อินเทอร์เฟซการกำหนดค่า สามารถตั้งค่ากำลังเอาต์พุตได้ (ตั้งค่า 3 ค่าตามลำดับ) และสังเกตว่าแบนด์วิดท์การรับส่งข้อมูลสอดคล้องกับการกำหนดค่าผ่านเครื่องวิเคราะห์สเปกตรัมหรือไม่ | ปกติ ☑ไม่ปกติ□ |
| 5 | การส่งผ่านการเข้ารหัส | เข้าสู่ระบบโหนด A และ B ผ่าน WebUI เข้าสู่อินเทอร์เฟซการกำหนดค่า ตั้งค่าวิธีการเข้ารหัสเป็น AES128 และตั้งค่าคีย์ (การตั้งค่าของโหนด A และ B ยังคงสอดคล้องกัน) และได้รับการยืนยันว่าการส่งข้อมูลเป็นเรื่องปกติ | ปกติ ☑Unปกติ□ |
| 6 | การใช้พลังงานสิ้นสุดของหุ่นยนต์ | บันทึกการใช้พลังงานโดยเฉลี่ยของโหนดด้านหุ่นยนต์ในโหมดการส่งสัญญาณปกติผ่านเครื่องวิเคราะห์พลังงาน | การใช้พลังงานเฉลี่ย: < 15w |
2. อัตราข้อมูลและการทดสอบความล่าช้า
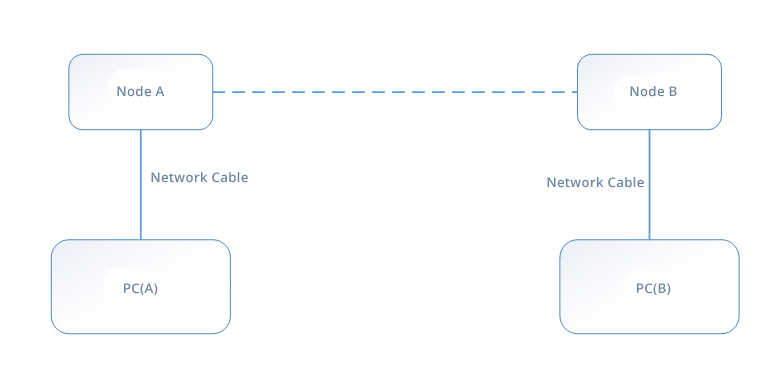
วิธีทดสอบ: โหนด A และ B (โหนด A คือเทอร์มินัลมือถือและโหนด B คือเกตเวย์การส่งสัญญาณไร้สาย) เลือกความถี่กลางที่เหมาะสมที่ 1.4GHz และ 1.5GHz ตามลำดับเพื่อหลีกเลี่ยงคลื่นความถี่รบกวนในสภาพแวดล้อม และกำหนดค่าแบนด์วิดท์สูงสุด 20MHzโหนด A และ B เชื่อมต่อกับ PC(A) และ PC(B) ผ่านพอร์ตเครือข่ายตามลำดับที่อยู่ IP ของ PC(A) คือ 192.168.1.1ที่อยู่ IP ของ PC(B) คือ 192.168.1.2ติดตั้งซอฟต์แวร์ทดสอบความเร็ว iperf บนพีซีทั้งสองเครื่อง และทำตามขั้นตอนการทดสอบต่อไปนี้:
●ดำเนินการคำสั่ง iperf-s บนพีซี (A)
●ดำเนินการคำสั่ง iperf -c 192.168.1.1 -P 2 บนพีซี (B)
●ตามวิธีทดสอบข้างต้น ให้บันทึกผลการทดสอบ 20 ครั้งแล้วคำนวณค่าเฉลี่ย
| ทดสอบRผลลัพธ์ | |||||
| ตัวเลข | เงื่อนไขการทดสอบที่ตั้งไว้ล่วงหน้า | ผลการทดสอบ(Mbps) | ตัวเลข | เงื่อนไขการทดสอบที่ตั้งไว้ล่วงหน้า | ผลการทดสอบ (Mbps) |
| 1 | 1450MHz@20MHz | 88.92 | 11 | 1510MHz@20MHz | 88.92 |
| 2 | 1450MHz@20MHz | 90.11 | 12 | 1510MHz@20MHz | 87.93 |
| 3 | 1450MHz@20MHz | 88.80 | 13 | 1510MHz@20MHz | 86.89 |
| 4 | 1450MHz@20MHz | 89.88 | 14 | 1510MHz@20MHz | 88.32 |
| 5 | 1450MHz@20MHz | 88.76 | 15 | 1510MHz@20MHz | 86.53 |
| 6 | 1450MHz@20MHz | 88.19 | 16 | 1510MHz@20MHz | 87.25 |
| 7 | 1450MHz@20MHz | 90.10 | 17 | 1510MHz@20MHz | 89.58 |
| 8 | 1450MHz@20MHz | 89.99 | 18 | 1510MHz@20MHz | 78.23 |
| 9 | 1450MHz@20MHz | 88.19 | 19 | 1510MHz@20MHz | 76.86 |
| 10 | 1450MHz@20MHz | 89.58 | 20 | 1510MHz@20MHz | 86.42 |
| อัตราการส่งข้อมูลไร้สายโดยเฉลี่ย: 88.47 Mbps | |||||
3. การทดสอบความหน่วง
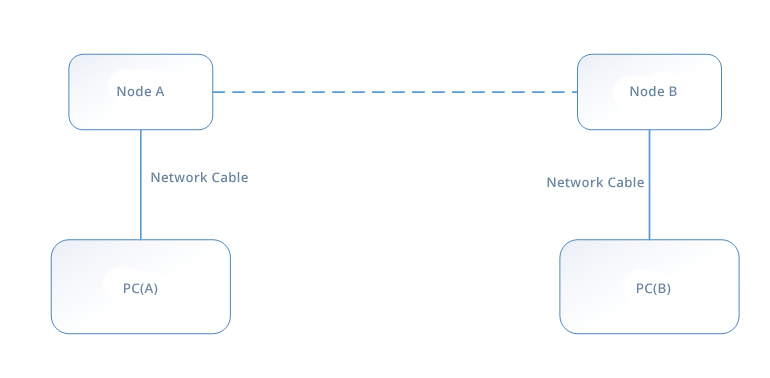
วิธีทดสอบ: บนโหนด A และ B (โหนด A คือเทอร์มินัลมือถือ และโหนด B เป็นเกตเวย์การส่งสัญญาณไร้สาย) เลือกความถี่กลางที่เหมาะสมที่ 1.4GHz และ 1.5GHz ตามลำดับเพื่อหลีกเลี่ยงคลื่นรบกวนไร้สายด้านสิ่งแวดล้อม และกำหนดค่าแบนด์วิดท์ 20MHzโหนด A และ B เชื่อมต่อกับ PC(A) และ PC(B) ผ่านพอร์ตเครือข่ายตามลำดับที่อยู่ IP ของ PC(A) คือ 192.168.1.1 และที่อยู่ IP ของ PC(B) คือ 192.168.1.2ทำตามขั้นตอนการทดสอบต่อไปนี้:
●เรียกใช้คำสั่ง ping 192.168.1.2 -I 60000 บน PC (A) เพื่อทดสอบความล่าช้าในการส่งสัญญาณไร้สายจาก A ถึง B
●เรียกใช้คำสั่ง ping 192.168.1.1 -I 60000 บนพีซี (B) เพื่อทดสอบความล่าช้าในการส่งข้อมูลไร้สายจาก B ถึง A
●ตามวิธีทดสอบข้างต้น ให้บันทึกผลการทดสอบ 20 ครั้งแล้วคำนวณค่าเฉลี่ย
| ผลการทดสอบ | |||||||
| ตัวเลข | เงื่อนไขการทดสอบที่ตั้งไว้ล่วงหน้า | PC(A)ถึง B Latency (มิลลิวินาที) | PC(B)ถึงค่า Latency (มิลลิวินาที) | ตัวเลข | เงื่อนไขการทดสอบที่ตั้งไว้ล่วงหน้า | PC(A)ถึง B Latency (มิลลิวินาที) | PC(B)ถึงค่า Latency (มิลลิวินาที) |
| 1 | 1450MHz@20MHz | 30 | 29 | 11 | 1510MHz@20MHz | 28 | 26 |
| 2 | 1450MHz@20MHz | 31 | 33 | 12 | 1510MHz@20MHz | 33 | 42 |
| 3 | 1450MHz@20MHz | 31 | 27 | 13 | 1510MHz@20MHz | 30 | 36 |
| 4 | 1450MHz@20MHz | 38 | 31 | 14 | 1510MHz@20MHz | 28 | 38 |
| 5 | 1450MHz@20MHz | 28 | 30 | 15 | 1510MHz@20MHz | 35 | 33 |
| 6 | 1450MHz@20MHz | 28 | 26 | 16 | 1510MHz@20MHz | 60 | 48 |
| 7 | 1450MHz@20MHz | 38 | 31 | 17 | 1510MHz@20MHz | 46 | 51 |
| 8 | 1450MHz@20MHz | 33 | 35 | 18 | 1510MHz@20MHz | 29 | 36 |
| 9 | 1450MHz@20MHz | 29 | 28 | 19 | 1510MHz@20MHz | 29 | 43 |
| 10 | 1450MHz@20MHz | 32 | 36 | 20 | 1510MHz@20MHz | 41 | 50 |
| ความล่าช้าในการส่งสัญญาณไร้สายโดยเฉลี่ย: 34.65 ms | |||||||
4. การทดสอบการป้องกันการรบกวน
ตั้งค่าสภาพแวดล้อมการทดสอบตามรูปด้านบน โดยที่โหนด A คือเกตเวย์การส่งสัญญาณไร้สาย และ B คือโหนดการส่งสัญญาณไร้สายของหุ่นยนต์กำหนดค่าแบนด์วิธของโหนด A และ B เป็น 5MHz
หลังจาก A และ B สร้างลิงก์ปกติตรวจสอบความถี่การทำงานปัจจุบันผ่านคำสั่ง WEB UI DPRPใช้เครื่องกำเนิดสัญญาณเพื่อสร้างสัญญาณรบกวนแบนด์วิธ 1MHz ที่จุดความถี่นี้เพิ่มความแรงของสัญญาณทีละน้อยและค้นหาการเปลี่ยนแปลงความถี่ในการทำงานแบบเรียลไทม์
| ลำดับหมายเลข | รายการการตรวจจับ | กระบวนการตรวจจับ | ผลการตรวจจับ |
| 1 | ความสามารถในการป้องกันการรบกวน | เมื่อมีการจำลองการรบกวนที่รุนแรงผ่านเครื่องกำเนิดสัญญาณ โหนด A และ B จะดำเนินการกลไกการข้ามความถี่โดยอัตโนมัติผ่านคำสั่ง WEB UI DPRP คุณสามารถตรวจสอบว่าจุดความถี่การทำงานเปลี่ยนจาก 1465MHz เป็น 1480MHz โดยอัตโนมัติ | ปกติ ☑ไม่ปกติ□ |
เวลาโพสต์: 22 มี.ค. 2024