Ներածություն
Hangzhou ** Intelligent Technology Company-ի հիման վրա ընտրեք անլար ժամանակավոր ցանցային ռադիո՝ ռոբոտ-շների փորձարկման զեկույցի համար օգտագործելու համար:

Օգտատեր
Hangzhou ** Intelligent Technology Company

Շուկայի հատվածը
Robot Dog և UGV


1, Փորձարկման նախապատմություն
1.1 Փորձարկման վայրը
Hangzhou ** Intelligent Technology Company
1.2 Փորձարկման ժամանակը
2023.10.23
1.3 Փորձարկման նպատակներ
Այս թեստի նպատակն է հիմնականում ստուգել երեք անլար ժամանակավոր ցանցային ռադիոկայանների անլար փոխանցման էֆեկտը, ներառյալ IWAVE'S Communications, Chengdu ** ընկերությունը և Beijing**ընկերությունը, LOS (Line-of-sight) պայմաններում և NLOS ( ոչ մի տեսադաշտ) պայմաններ՝ մոդելավորելու և փորձարկելու իրական կիրառական սցենարները ռոբոտ շան և օպերատորի միջև:
1.4 Փորձարկման սցենարի ընտրություն
Ըստ փաստացի սցենարի՝ ընդունող ծայրի ալեհավաքի բարձրությունը սահմանեք 1,5 մետր, իսկ Robot dog ծայրի բարձրությունը՝ 0,5-0,6 մետր:Օգտագործեք փաթեթների լրացման գործիքը փոխանցող վերջում (սիմուլյացված Robot dog end) փաթեթներ ներարկելու համար նոութբուքի համակարգչի ընդունիչ վերջում (սիմուլյացված վերահսկիչի վերջ):
Փորձարկման սցենարները ներառում են բացօթյա և ներսի տեսարաններ:
Բացօթյա տեսարանը ներառում է նաև 0,5 կմ տեսադաշտի փորձարկման կետ, 1,1 կմ տեսադաշտի փորձարկման կետ, 1,15 կմ ոչ տեսադաշտի փորձարկման կետ (մեծ անկյուն), 1,2 կմ ոչ գիծ - տեսողության փորձարկման կետ (որտեղ ճանապարհն ավարտվում է շրջվելուց հետո):
Ներքին տեսարանի համար ընտրվել են համեմատաբար լուրջ խոչընդոտներով երկու տեղ՝ աստիճանների մուտքը և պահեստը:
| ՈՉ | Փորձարկման սցենարներ | Փորձարկման կետ | Դիտողություն |
| 1 | Բացօթյա տեսարանի փորձարկում | Կետ 1. 0,5 կմ LOS փորձարկման կետ | |
| 2 | Կետ 2. 1.1 կմ LOS փորձարկման կետ | ||
| 3 | Կետ 3. 1,15 կմ ոչ տեսադաշտի փորձարկման կետ | ||
| 4 | Կետ 4. 1,2 կմ ոչ տեսադաշտի փորձարկման կետ | ||
| 5 | Ներքին տեսարանի փորձարկում | Կետ 1. Անվտանգության անցուղի սանդուղք | |
| 6 | Կետ 2. Պահեստ |
2, Փորձարկման սցենարներ --- Բացօթյա տեսարան
2. Բացօթյա տեսարանի փորձարկում
2.1 Փորձարկման մեթոդի նկարագրություն
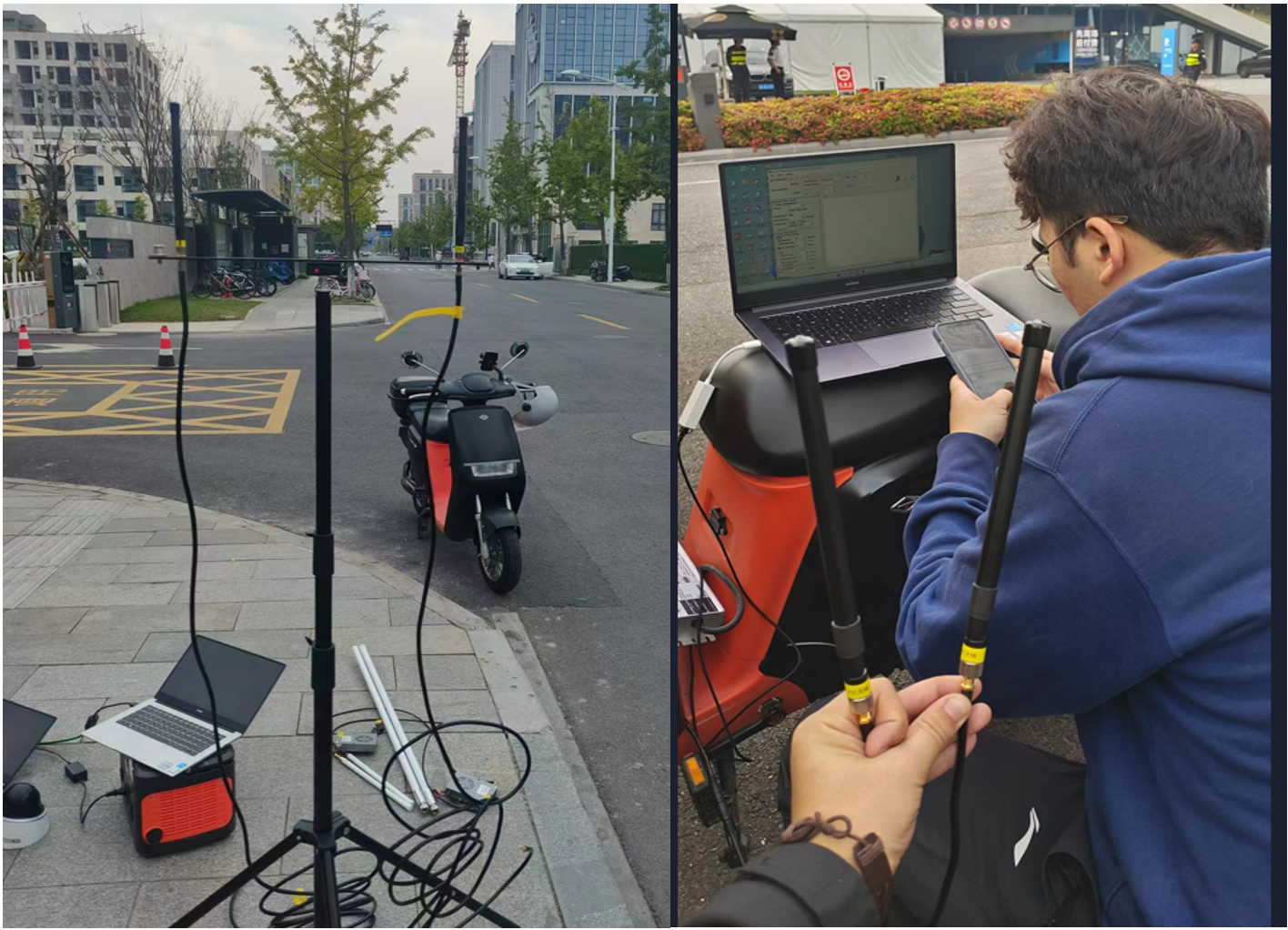
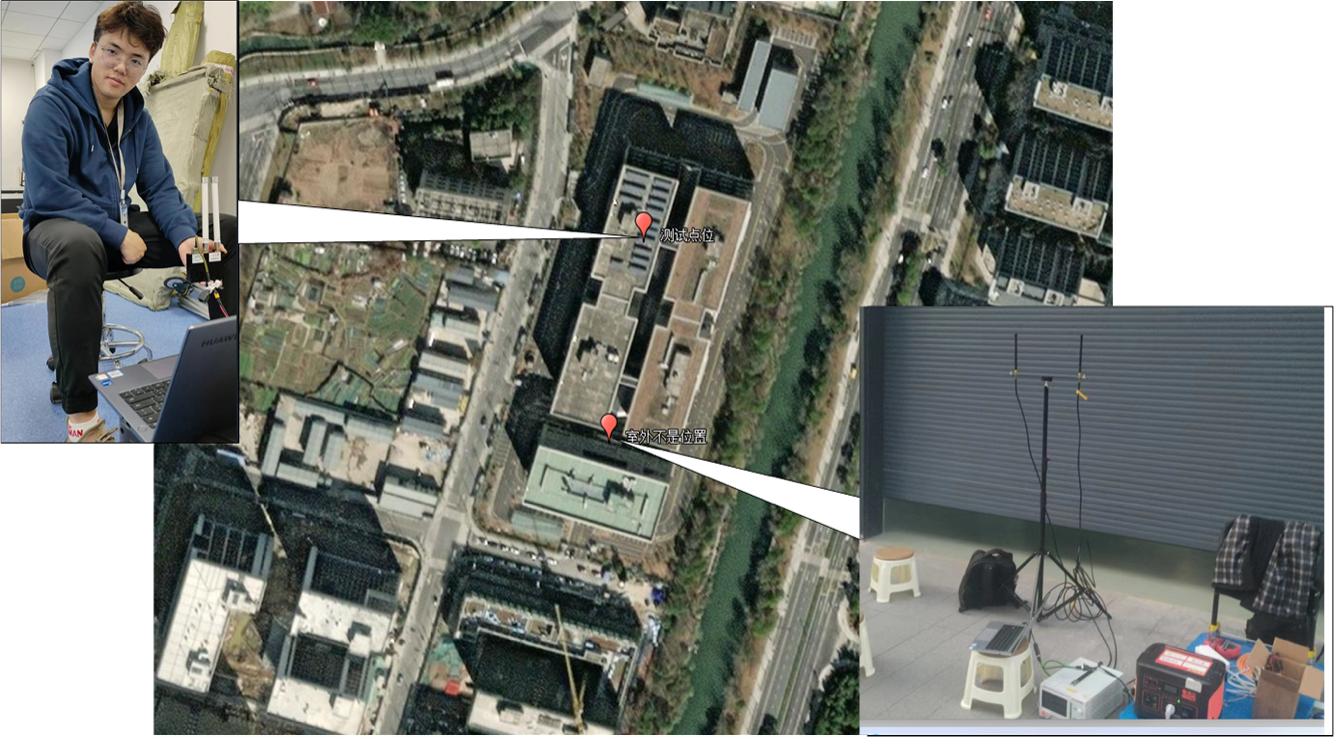
Փորձարկման տեսարանը ընտրվել է ճանապարհի վրա՝ անմիջապես այգու դիմաց, որտեղ գտնվում է Hangzhou ** Intelligent Technology Company-ն:Ընդունող վերջի (սիմուլյատորի վերահսկիչի վերջ) ալեհավաքը տեղադրվել է մոտ 1,5 մետր բարձրության վրա, և երկու ինժեներ վարել են էլեկտրական հեծանիվներ՝ նմանակելու հաղորդիչի ծայրը (ռոբոտի շան վերջի նմանակված) , հաղորդիչի իրական բարձրությունը մոտ 0,5 մետր է։ ;տես ստորև բերված նկարը.

Ստացողը օգտագործում է անլար ժամանակավոր ցանցային ռադիո + նոութբուք և գործարկում է IPerf ծրագրակազմը՝ երթևեկության վիճակագրություն հավաքելու համար:Հաղորդիչն օգտագործում է անլար ժամանակավոր ցանցային ռադիո + նոութբուք և գործարկում է IPerf ծրագրակազմը՝ փաթեթները տարբեր արագությամբ լցնելու համար:Ստուգեք համապատասխանաբար չորս տեղակայման կետերի փոխանցման միջին թողունակությունը.
Արտադրողի սարքավորումների մասին տեղեկություններ.
| NO. | Ընկերություն | Հաճախականություն (ՄՀց) | Հզորություն (Վտ) | Անտենայի ավելացում (dbi) | Դիտողություն |
| 1 | IWAVE Communications | 806-826 ՄՀց | 2 | 2 |
|
| 2 | Չենգդու ** ընկերություն | 1427-1447 ՄՀց | 10 | 4/5 |
|
| 3 | Պեկին*** ընկերություն | 566-606 ՄՀց | 2 | 6 |
|
3, Երեք ընկերության առաջընթացը և արդյունքը
3.1 IWAVE կապի փորձարկման գործընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.
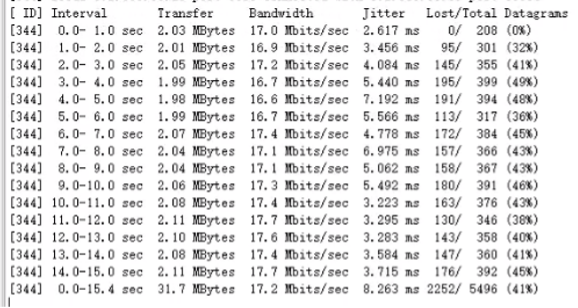
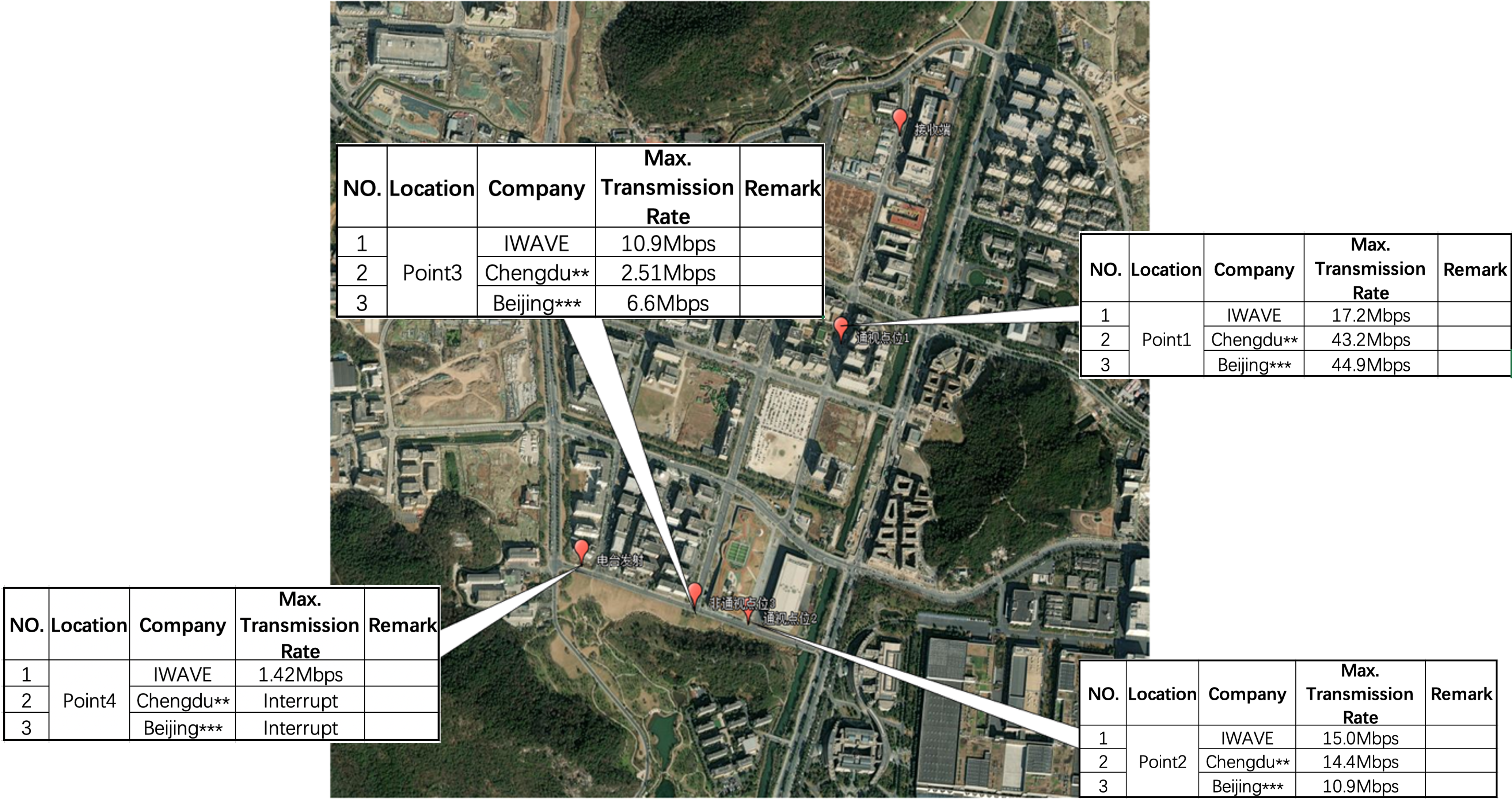
Ø Տվյալների փաթեթի լրացման իրավիճակը 1-ին կետում. փաթեթի լրացման առավելագույն արագությունը 17.2 Մբ/վ է
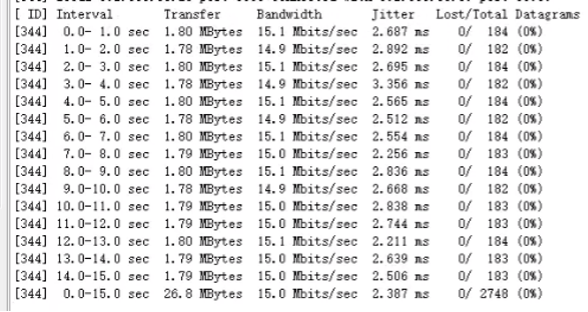
Ø 2-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 15.0 Մբ/վ է
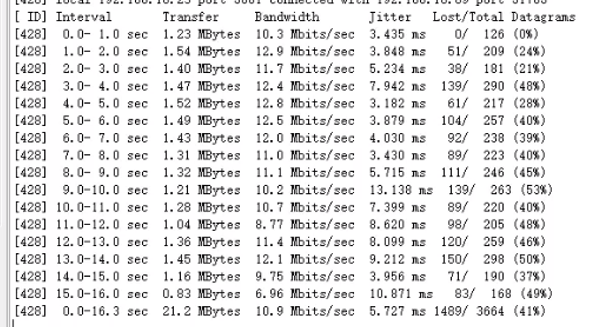
Ø Տվյալների փաթեթների լրացման իրավիճակը 3-րդ կետում. փաթեթների լրացման առավելագույն արագությունը 10.9 Մբիթ/վրկ է
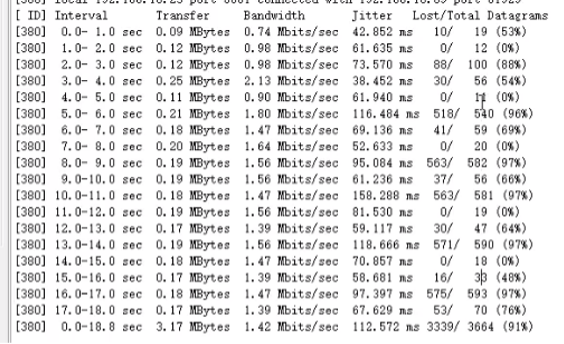
Ø 4-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 1.42 Մբ/վ է

3.2 Չենգդու ** ընկերության Փորձարկման առաջընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.

Ø Տվյալների փաթեթների լրացման իրավիճակը 1-ին կետում. փաթեթների լրացման առավելագույն արագությունը 43.2 Մբ/վ է:

Ø 2-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 14,4 Մբ/վ է:

Ø Տվյալների փաթեթների լրացման իրավիճակը 3-րդ կետում. փաթեթների լրացման առավելագույն արագությունը 2,51 Մբիթ/վրկ է և 2,01 Մբիթ/վրկ;

Ø Տվյալների փաթեթների լրացման իրավիճակը 4-րդ կետում. անլար կապն ընդհատվում է, և փաթեթների ուղարկման և ստացման փորձարկումը չի կարող իրականացվել.


3.3 Պեկին *** ընկերության Փորձարկման գործընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.

Ø Տվյալների փաթեթների լրացման իրավիճակը 1-ին կետում. փաթեթների լրացման առավելագույն արագությունը 44.9 Մբ/վ է:

Ø 2-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 10,9 Մբ/վ է:

Ø Տվյալների փաթեթների լրացման իրավիճակը 3-րդ կետում. փաթեթների լրացման առավելագույն արագությունը 6.6 Մբ/վ է;

Ø 4-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. անլար ընդհատում, փաթեթների ուղարկման և ստացման փորձարկում չի կարող իրականացվել:

4, Փորձարկման սցենարներ --- Ներսի տեսարան
4 Ներսի տեսարանի փորձարկում
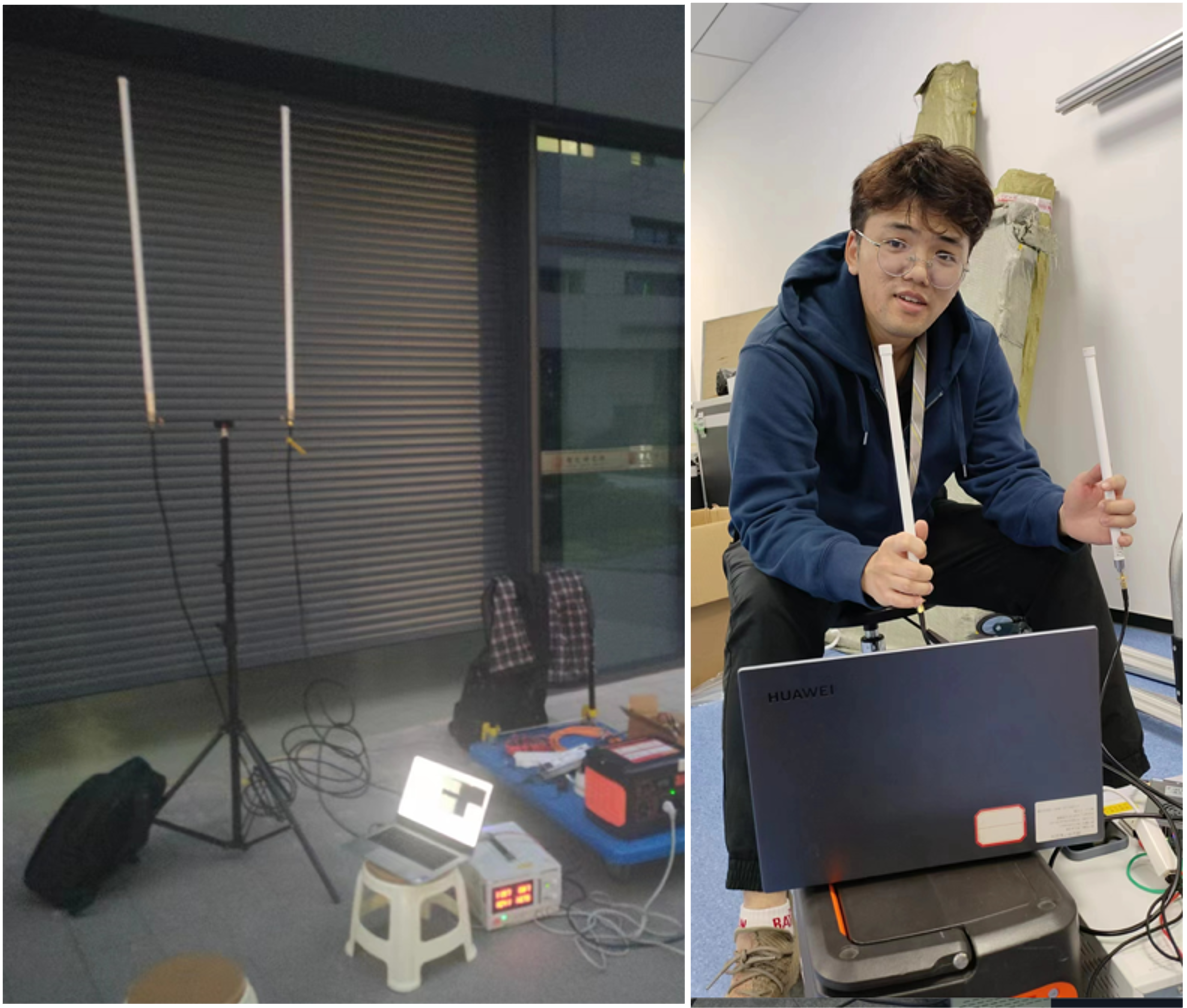
4.1 Փորձարկման միջավայրի նկարագրություն
Շենքում փորձարկում կատարելիս ընդունիչը տեղադրելու համար ընտրվեց Hangzhou**Intelligent Technology Company-ի շենքից դուրս գտնվող մի անկյուն:Այնուհետև ընտրեք աստիճանահարթակը (կետ 1) և պահեստը (կետ 2) փակ փակ փակմամբ որպես պայմանագրային փորձարկման վայր;երեք ալեհավաքները տեղադրվում են նույն բարձրության վրա՝ կիրառման իրական սցենարը մոդելավորելու համար (կարգավորիչի վերջը 1,5 կմ բարձրությամբ, ռոբոտ-շան ծայրը 0,5 մետր բարձրությամբ մոդելավորված), գրանցում է փաթեթի ուղարկման և ստացման կարգավիճակը:
5, Երեք ընկերության առաջընթացը և արդյունքը
5.1 IWAVE կապի փորձարկման գործընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.

Ø Տվյալների փաթեթների լրացման իրավիճակը 1-ին կետում. փաթեթների լրացման առավելագույն արագությունը 15.2 Մբ/վ է;

Ø 2-րդ կետում. Պահեստի փորձարկման ժամանակ փաթեթների լրացման առավելագույն արագությունը 14,7 Մբիթ/վրկ է.

5.2 Չենգդու ** ընկերության փորձարկման գործընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.

Ø Տվյալների փաթեթների լրացման իրավիճակը 1-ին կետում. փաթեթների լրացման առավելագույն արագությունը 6.15 Մբ/վ է:

Ø 2-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 23.4 Մբ/վ է:

5.3 Պեկին *** ընկերության Փորձարկման գործընթացը և արդյունքը
Փորձարկեք տեղում միջավայրի կարգավորումը.
Ø Տվյալների փաթեթների լրացման իրավիճակը 1-ին կետում. փաթեթների լրացման առավելագույն արագությունը 24.8 Մբ/վ է:

Ø 2-րդ կետի տվյալների փաթեթների լրացման իրավիճակ. փաթեթների լրացման առավելագույն արագությունը 23.3 Մբ/վ է:

Ամփոփում
Բացօթյա փորձարկման սցենարում, 1-ին և 2-րդ կետերում, ընկերության բոլոր երեք ռադիոկայանները կարող են բավարարել 6 Մբիթ/վրկ կամ ավելի բարձր փոխանցման արագության պահանջը:3-րդ կետում IWAVE Communications և Beijing **Ընկերությունը կարող է բավարարել 6 Մբիթ/վրկ փոխանցման արագության պահանջը:4-րդ կետում միայն IWAVE Communications-ը կարող է նորմալ պահել կապը և կարող է իրականացնել 1,5 Մբիթ/վ արագությամբ տվյալների հոսքի հոսք:Հեռավոր և ոչ տեսանելի իրավիճակներում IWAVE կապի սարքավորումներն ավելի լավ կապի կայունություն և փոխանցման էֆեկտներ ունեն:
Ներքին փորձարկման սցենարում, սահմանափակ պայմանների պատճառով, անհնար էր մոդելավորել ավելի բարդ սցենարներ, և երեք սարքերի վերջնական արդյունավետությունը չի չափվել:Դատելով թեստի արդյունքներից՝ թեստի արդյունքները Hangzhou **Intelligent Technology Company-ի շենքում ցույց տվեցին, որ ընկերության բոլոր երեք ռադիոկայանները կարող են բավարարել 6 Մբիթ/վրկ-ից բարձր փոխանցման արագության պահանջը:
Հրապարակման ժամանակը՝ նոյ-17-2023